JSR Intro
A control system is a device, or system of devices, that manages, directs or regulates the behavior of other devices or systems and/or itself. This can be as simple as a remote controlled toy car, all the way up to extremely complex industrial control systems in manufacturing plants.
Often, an important part of the control system is feedback from the controlled device - these are called closed loop control systems, and utilize sensors for supplying the feedback; for example a rivet machine on a car assembly line that gives feedback about the resistance encountered. Systems with no feedback from the controlled device are called open loop control systems; for example the speed control of a simple remote control car that doesn't sense it's about to crash into a wall.

Simple diagram of a closed loop control system
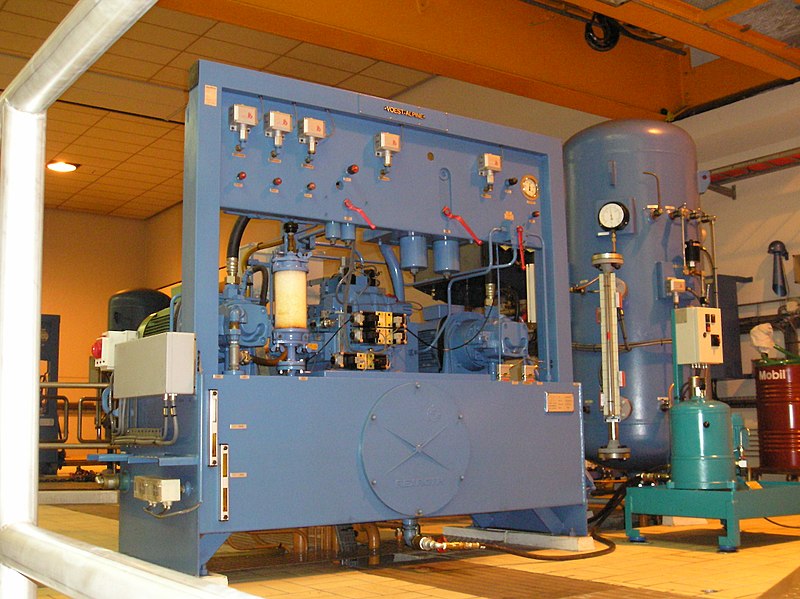
One of a myriad of industrial control systems ("Amerongen Hydrocentrale") used in manufacturing.
Centralized control systems
JSR Note: Centralized control systems is the sub topic for Assessment Statements 7.1.1 - 7.1.6, but really, various kinds of control are discussed. The focus for you with 7.1.1 - 7.1.6 should be control systems in general, not whether or not they are centralized or distributed.
Discuss a range of control systems.
Teaching Note:
A variety of control systems should be examined such as automatic doors, heating systems, taxi meters, elevators, washing machines, process control, device drivers, domestic robots, GPS systems, traffic lights and other common devices.
Technical knowledge of specific systems is not expected but students should be able to analyze a specified system.
AIM 9 Develop an appreciation of the possibilities for control systems with developments in computer systems.
Intro & Focus
The three big things with each of these control systems to ask yourself is:
- what is sensed
- how is it sensed
- what is done with the data coming from the sensor
There should be no need to delve deeply into each of the below systems, rather have a general appreciation for the three things noted above for each.
Washing machines
General Description:
After you fill the tub with clothes, the machine fills the tub with water, and then stirs the clothes around using an agitator. Then, after some time agitating, the washer drains the water and then spins the clothes to remove most of the water. Then, it refills, and agitates the clothes some more to rinse out the soap. Then it drains and spins again.
Washing Machine
|
Washing Machine Parts
|
Timer Dial and Other Buttons |



- in a more conventinal machine (rather than a new Samsung, for example, which is fully digital) to begin, the user turns a big round dial to the desired routine and time
- when a start button is pressed the dial starts turning very, very slowly (due to a gearing down mechanism),
- as strips of various metal contacts on the dial pass by the main control contact, one of six or so cycles begins (like water in, or water out), with the completion of the given circuit
- the length of the various contact strips on the dial is what determines the duration of the various cycles - so this is an example of an open loop system
- (but in fully digital systems, all of this will be controlled by digital sensors and the microprocessor)
- there are switches for determine if hot or cold water is to be used, and a closed loop system of thermometer and microprocessor to keep the temperature at what was set initially
- and a water level sensor (so a closed loop system) which uses pressure to detect the water level in the tub, which is air tight when the door is closed. Or a weight sensor, since both clothes and water contribute to the overall weight being worked with.
---> In terms of the kind of control system, we can term this local centralizedized control; it's certainly not distributed control, rather control by the machine for the machineSensor's Role:
Temperature (thermometer)
⁃ this is the only way to measure temperature
Water level (likely the use of a pressure switch)
⁃ this works by having the drum of the washing machine air tight, so that the air pressure inside the drum increases when water is added. Once the pressure reaches a specific point, the water valve is closed.
"Spin-out-of-balance" (displacement sensor)
⁃ measures how much the drum moves when it spins. obviously the drum needs to move a little when there is an uneven load, but when the drum spins irregularly to a point where its displacement is greater than normal, the
sensor gives of a warning message
Plus:
- drum speed sensor...
- Water main failure (FloodStop) sensor...
- Door closed sensor...Microprocessor's role:
The microprocessor has two general functions:
⁃ 1) Taking in the values that the user gives and running a cycle with those values
⁃ i.e. running a cycle at 100º C, delicate, slow rotation...
⁃ 2) Making sure that all the sensor inputs (outlined above) are what they should be; if they aren't then the machine should report an error or try to fix it
⁃ i.e. if a cycle should be running at 100º but is at 90º, then the machine senses this and tries to correct it.Particular functions of the microprocessor include:
- Control of heating the water to a specific temperature.
- Control of spinning speed.
- Monitoring weight, possibly via a simple Newton meter (a spring).
Improvements Over Past Systems
& Future of Washing Machines:Digital sensing of the various inputs can increase the efficiency of the wash and flexibility of the kinds of cycles which can be run. In older models, there were a limited number of standard cycles, which did not take into account real load weights, for example.
In the future, some sort of biological sensor to determine when the load is clean, based on the amount of remaining bacteria etc. in the water.
Automatic Doors
(Like the Math Quad automatic doors just outside room 3-120)
General Description:
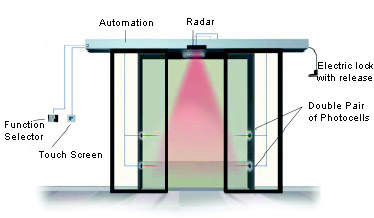
Basically, the whole process boils down to the optic/motion sensors. The sensors are mounted over the door, as well as being integrated within the door slides. The sensors use either infrared or microwave technology to observe motion. As the sensors detect the motion, then the door can be opened.
- either an infrared or microwave signal is sent from the main sensor down from the front middle of the door
- if that sensor receives positive feedback, in the form of the beam bouncing back at a certain level (so as not triggered by a mosquito, for exammple, and neither triggered by the floor), it is assumed a person is there, and a signal is sent to the processing unit
- the processing unit will then either open the door if it is closed, using two motors, or leave the doors open
- when the main sensor signal no longer is receiving beams bouncing back, it is assumed no one is waiting for the doors to be or remain open
- so then, for closing the doors, control is shifted to another pair of photocell sensors to check to see if there is anyone in-between the two doors; alternatively touch sensors on the doors are (fortunately, for cats) used
- and if not, a signal is sent to the processor to close the doors,
- and the processor sends a signal to the the motors to close the doors
---> In terms of the kind of control, this is also pretty much "local" centralized control; just the door controlling itself.:
Though there could be more coordinated centralized control when there are a series of doors one after the other, and the opening of one implies the other will soon need to open.
Sensor's Role:
To report to the microprocessor whenever an object that is likely a person is within the set range of the sensor.
These sensors are pretty unintelligent: there is something there or not. But they may require a certain size to trigger them, so a mouse, for example would not.
Microprocessor's Role:
To determine the various states ("person approaching" or "no person approaching", and "person inbetween the door", or "person not inbetween the door"), and send signals to open and close the doors accordingly.
Determination of whether to keep opening, or start closing (for example in the middle of a close operation, start opening again if an arm is still there.)
Improvements Over Past Systems
& Future of Automatic Doors:
Alternatively, a weight sensor can be used to trigger the opening of the doors; if a person was standing in front of the door, then it would sense the change in weight, and the door would open.
The use of a weight sensor has an advantages of having a clearer measurement and has a less advanced level of technological sophistication and thus potential repair. With motion/optical sensors, even a change in air flow could potentially trigger the opening of the doors.
The use of weight sensor has clear disadvantage too. The area of detection is not as flexible as the one by motion detector, which can simply increase or decrease the detective range by putting less or more micro/infrared waves. Furthermore, the motion detector is much more durable, as the sensors are not the ones which receive the influence of the pressure directly.
Other alternatives (present or future) include:
Voice activation, laser, motion, like with Kinect, retina scanner, camera, the proximity of a key or card (as seen with modern cars' keys which unlock the car as the owner approaches).
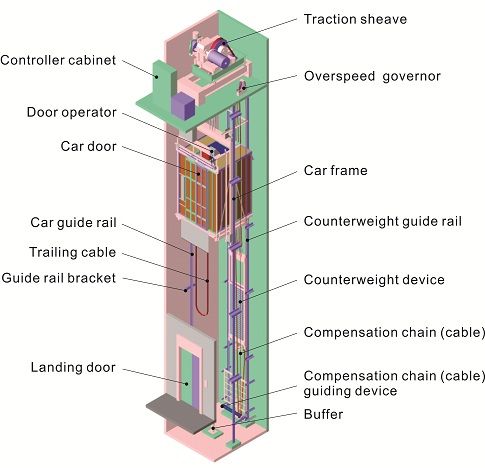
Elevators
- Generally, motors move an elevator up and down through a shaft based on requests received to go up or down from and to certain floors
- a up or down button pressed at a certain floor send that request to the processor
- the main processor then determines the optimal elevator (assuming more than one) to look after than request, based on both how close it is to that floor, and if it is currently in motion, direction it is going, and possibly also the current load weight
- the main processor knows where each elevator cab is through information sent to it from sensors in the cabs that read a series of holes in a long magnetic tape along the shaft
- the main processor, upon determination of the best cab for the request, sends the appropriate up/down signals to the appropriate elevator cab motor controlling it's suspension cables
- using feedback from the magnetic sensors, the cab will slow down gradually as it reaches a certain point, and stop at the desired floor
- the doors then open, remain open for a certain amount of time, and then automatically start to close
- if a person is still in-between the doors, an infrared and/or mechanical touch sensing devices within the doors will sense this, and trigger opening the doors again
- a button is pressed for the desired floor, this signal is sent to the main processor, and appropriate commands are then sent to the motors of that elevator cab
---> Degree of local centralized control vs. more widely spread centralized control: Each elevator can look after it's own, though take input from the others it is beside, or in a multi-elevator system, it makes sense to have more widely cast centralized control for the determination of which elevator is assigned to which job.
HowStuffWorks "How Elevators Work"

Elevator "Lifts" By Chris McKenna (Thryduulf), CC BY-SA 4.0

This is the elevator control system at my Phuket condo, Bablyon Sky Garden.
Sensor's Role:
Technologies of the control system:
- Control mechanisms to dictate where you are going (buttons and then through electric signals to either the valve or the control system)
- Safety devices (phones, speakers, cameras will have various audio-visual sensors which relay to the microprocessor)
- Different access methods to certain floors via secure cards or keys.
- Weight sensors for overload.
- Door senses pressure if closing on someone.
- For certain kinds of elevators, it is entirely encoders which are responsible for the calculation of where to stop, and also for speed and acceleration; via a "closed PID loop".
Microprocessor's Role:
The microprocessor controls opening and closing of doors in various normal operations and safety situations.
And the microprocessor may run sophisticated algorithms to determine the best up/down stop/start sequence during busy traffic times, and may even include data from other parallel elevators in the same building.
Improvements Over Past Systems
& Future of Elevators
"Smart" up/down stop/start algorithms will lead to much more efficient transport of passengers, particularly in multiple-elevator systems and during high traffic times.
Traffic Lights
General Description:
For Cars:
- Inductive loops: A groove is cut on an asphalt road, electric circuits are placed and covered. Whenever cars pass on, those electric circuits sends signal to the traffic light connected to them that the traffic light can sensor how many cars are coming or waiting.
- Detectors: Detectors mounted on poles beside roads sensor cars. This way is more efficient then inductive loops. It takes less money to install, and also able to send real-life photos as well that inductive loop cannot do.
Pedestrian crossing often use traffic lights to ensure safety for both the drivers and the pedestrians.
- The pedestrian pushes a button which sends a signal to a microprocessor to request a walk sign
- the microprocessor then determines the appropriate time to wait to trigger the signal to change, based on the other traffic lights at that corer
- when the time has come, other lights are changed to amber and then red, and the walk sign is changed to go

By Pluke, Creative Commons CC0 1.0
Automatic traffic lights can use underground electrical wire to induce an electromagnetic field (an inductive loop detector) which will detect any presence of metal, i.e. a car, and send a signal to a processor to change the light to green.
Great video with several technologies for traffic lights control.
---> Degree of local central control vs. more widely spread centralized control
Can be an individual traffic light looking after itself, or more likely a system which is controlled in a centralized more widely, as with synchronized lights that turn green one after the other
Sensor's Role:
The sensor reports back continually to the microprocessor when a vehicle is approaching (either through motion detection or weight detection).
Microprocessor's Role:
The microprocessor takes in the sensed motion or electromagnetic signal, and initiates the change in the traffic light's color, either immediately, or upon consideration of traffic going the other way and/or the amount of time since the light last changed color. Other inputs can be taken into consideration, such as if a tram is coming one direction or another (in Prague, at least, trams trump cars in almost all traffic interchange situations; the way they are going will be a green light - refer to the video linked above for more on this.)
Improvements Over Past Systems
& Future of Traffic Lights:
Past: A fixed traffic light system, which does not require/use sensor systems at all; the traffic light rotates to green and red for certain time period.
Future: Infrared: Cars emit infrared that are recognized by devices can communicate with traffic lights. However, one disadvantage is if this is not part of the original car, then people have to buy devices.
Radio Frequency: Input would be radio wave. This could be used without extra installation such as infrared since most cars have radio function. However, the problem is that Radio waves are not always recognizable, especially when the car windows are covered with coating.
Card sensor: Input would be information in cards such as bar code or QR code. Traffic lights sensor card within cars and analyze information. This could require less money than Inductive Loops method.
But all of this will soon be replaced by a distributed control system of all vehicles, autonomously driven, but continually supervised also.
GPS
The Global Positioning System (GPS)
General Description:
Generally, it's a location determination technology all based on trilateration of the distances of three satellites from the ground position. Here's a good GPS video, with a good description of trilateration.
- The US government's NASTAR GPS system that we all use consists primarily of thirty satellites which circle the globe at a fairly low orbit of 20,000 km, making two complete rotations every day.
- each satellite sends off microwave signals which our GPS receivers can receive
- these signals include information about the exact time the signal was sent, and its location.
- with this information, a distance of each satellite from the receiver can be determined
- and with at least three distances of three different satellites received, using the process of trilateration, an exact location of the receiver can be determined
(it's basically the only place on earth these three distances could simultaneously intersect - and with a fourth, altitude can also be taken into consideration).
Another great video explaining how GPS works
---> Degree of local central control vs. more widely spread centralized control
Centeralized control of all satallites from one "command center".

Sensor's Role:
Ground Control Stations (could be our phone's GPS receiver): Sensors continually receive location information from each satellite.
The Satellites Themselves: Somehow they must precisely sense their position over the earth, to be reported to their microprocessors in case corrective positioning must be taken.
Microprocessor's Role:
Ground Control Stations: the microprocessors monitor various important processes going on in each satellite which maintain its stable orbit, and also potentially instruct corrective measures on board the satellite when errors or problems occur.
The Satellites Themselves: the microprocessors control all of the activities of the satellite, including the important transmission of "beams" down to earth, where GPS units receive them.
Improvements Over Past Systems
& Future of GPS:
New geo-positon-using apps are being developed every day, since the smart phones which use them move with their owner, and can therefore report back things such as the nearest pizza restaurant or police station.
Heating and Cooling Systems
General Description:
An individual sensor keeps track of the temperature and adjusts the level of heating accordingly.
Or an array of sensors throughout the building send data back to a centralized microprocessor/server, and it controls the various heating or cooling systems.
Sensor's Role:
The sensor senses the temperature in the room and reports it continually to the microprocessor.
In terms of physically how this is sensed: thermo-couples can sense changes in temperature to very small degrees.
Or, more conventionally, the sensor has something that expands and contracts with change in temperature.
And there are a variety of other teamperature sensing devices/techniques.
Microprocessor's Role:
When the temperature reading in the room rises above a certain level, the heating/cooling unit is either turned down or turned off, and when the temperature reading falls below a certain level, the heating/cooling is turned up or turned on.
Improvements Over Past Systems
& Future of Heating Systems:
An interesting thing is to note that a digital sensor is actually not as sensitive as an analog one.
But a microprocessor allows a lot more flexibility in how the temperature is regulated. For example, the user can make a schedule which sets varying target temperatures - warmer during the day and cooler during the night.
An improvement could be adding the control possibilities to the sensor itself, giving it a degree of autonomy. A "smart" sensor unit.
Taxi Meter
General Description:
Both distance and waiting time needs to be tracked. A sensor is attached to the cab and every time the cab travels a certain distance, this sensor sends electric pulses to the meter. There is a timer in the meter that sends out a pulse whenever a certain amount of time has passed while stationary.
When in slow, or stop-and-go traffic, the meter will use a combination of distance and time data according to a certain algorithm.
Sensor's Role:
One sensor passes the data necessary for distance calculations, and one sensor passes data about wait time to the microprocessor.
Distance is measured through the rotation of the wheels, as the encoders of a robot car work, so the sensor senses each rotation of the tire by proximity of a magnet, or laser with a time delay mechanism.
Microprocessor's Role:
The microprocessor takes in the various inputs, both distance and wait time inputs and other selections made by the driver (like midnight to dawn extra charge, or bridge toll), and continually calculates and displays the fare on the meter.
Improvements Over Past Systems
& Future of Taxis:
What are alternative ways of sensing input?
A motion sensor could be used to see how much of the time is spent traveling and how much is spent waiting. The amount of gas used by the car could be measured so fares accurately represent how much gas costs for the trip.
Process Control
General Description:
By this, any multi-step process could seen as process control, and so the situation of sensors on an assembly line at a factory controlling things.
Sensor's Role:
Various sensors sensing various things. Think of a car assembly line, and things to be sensed such as where parts are, and when rivets have been successfully riveted, and the temperature of various machinery and robots. Tons, and tons of things to be sensed, and controlled through a heirarchical distributed control system, both for efficiency and safety reasons.
Microprocessor's Role:
To interpret all the various sensor input information, and send back control instructions to the various machines/robots based on that data.
Improvements Over Past Systems
& Future of Process Control:
Increased autonomy handed over to the various machines or robots.
Device Drivers
General Description:
This usage of device drivers probably means peripherals connected to a computer, say for example: a joystick or mouse.
Sensor's Role:
Mouse Example - two types:
Optical mouse sensor senses: acts like a dumb camera, and when it moves, communicates this to the computer.
Mouse ball sensor - moving ball rotates the horizontal and vertical rollers.
Microprocessor's Role:
Microprocessor is actually in the computer, but it takes in the data from the mouse via the sensor. The processing is done by the CPU in conjunction with the driver software
In the mouse example, to interpret the signals given from the sensor, via working with the specific mouse (software) driver, and then pass on the desired cursor movement etc. to the application being used.
Improvements Over Past Systems
& Future of Device Drivers
In the mouse example, solve the issue of optical mice dysfunction on certain shiny surfaces.
Domestic Robots
General Description:
Automated roaming vacuum cleaners, such as the Roomba track around a floor according to a variety of algorithms, and when they bump into a wall or furniture, they change direction and keep on cleaning.
Sensor's Role:
The main sensor is the touch sensor about the circumference of the machine; it's role is to feedback to the microprocessor when it has hit the wall, or some other obstacle.
Microprocessor's Role:
The processor, in a basic one of these machines, simply controls the time of the clean and determines when an obstacle has been struck, and which direction to then try going.
In a potentially more sophisticated machine, one way or the other, information about the room to be cleaned is taken into consideration in the development of an ideal series of cleaning forays.
Improvements Over Past Systems
& Future of Domestic Robots
There theoretically could be sensors to sense the "cleanliness" of the floor over which the robot currently is. This could be done through the sensing of physical particles being taken in, or through smell.
Poor algorithms can result in both a waste of time and energy, and parts of a floor being missed - so work is still needed to improve cleaning algorithms.