7.1.5
Describe the role of feedback in a control system.
Teaching Note:
LINK Connecting computational thinking and program design.
Sample Question:
sdfsdfsf
JSR Notes:
Before starting with this one, note that it is one of these assessment statements which can be looked at in two ways, generally and particularly. So a question might be to generally describe the role of feedback in control systems, or it could be to describe the role of feedback in a particular situation, such as in an elevator. So be prepared for both approaches; on this page, the first part is more general, and the second part takes particular examples.
General Description of Feedback
First of all recall the very beginning of 7.1.1; I'll paste it and its associated diagram again here:
A control system is a device, or system of devices, that manages, directs or regulates the behavior of another part of that system. Sometimes the control is done in a "dumb"/"uninformed way, and sometimes the control is done in an "informed" way. If a sensor is involved, that's the "informed way"; the sensor it will feed back information to the processor. We refer to such a system that uses feedback as beinga "closed loop" system.
Since Topic 7 is about IT sensor systems, it is only closed loop, or feedback controlled systems which we are dealing with.
To appreciate the difference between an open loop system, and a closed loop (sensor) system, firstly consider the example of a simple, uninformed open loop rivetter, which is used to punch rivets into metal. It has no idea of the resistance it encounters, and so just rivets at the power the machine is set to. With no feedback, it could potentially blow a big wide hole in the metal, or in another case not be powerful enough to work.
Whereas if it were using a sensor control system, it could sense the resitance, and adjust the power of each particular rivet punch. Such a closed loop/feedback system obviously has advantages. Feedback indeed provides a fundamental role in modern day (sensor/processor) control systems.

Simple diagram of a closed loop control system
In the above diagram, the feedback part is indicated by B (which would be the sensor) along with the arrows going from the output to the input.
In a sensor system, "feedback" is therefore the "communication" of something back to the processor.
And the processor uses the data sent back via feedback in some way. Quite often this is to keep the system in a stable state, such as the cruise control of a car keeping the speed constant, whether going uphill or downhill.
Relationship between output and input
Consider the way that output and input relate, in a closed loop (feedback) system. The output results in constantly generated data coming back to the processor. Depending on the data coming back as input, the processor will change or maintain the current output, in order to achieve the desired result of the system.
So take the example of cruise control in a car, in which it is trying to maintain a constant speed. If what is being sensed and fed back to the processor is a speed above the upper limit, then output will be adjusted to slow down the car. And if the input being fed back to the processor is speed below a lower limit, then the output power is adjusted upward.
So input fed back to the processor potentially affects the output. And the correlate is also true, that the output itself will often result in changes to the input coming back. Thus the concept of a "looped" system. Output affects input, and input potentially affects output.
Constant Feedback
Note that usually in sensor control systems, the data being monitored is either continually changing, or can change at unexpected times. So it is important that the control system constantly monitor the information on which it is basing its decisions.
Example Question
May 2018 Paper 1
_________________________
14. A number of devices in and around the home can be operated by control systems.
The home owner has installed a control system that waters the flowerbeds in the garden. This system aims to maintain the water content of the flowerbeds between a minimum and a maximum value. However, the system is only activated when the light intensity is below a certain level.
(c) Outline the algorithm involved in controlling the watering system described above. [5]
_________________________
Firstly a diagram to help you understand a negative feedback scenario like this
(with only the water level part, not the light sensor part also):
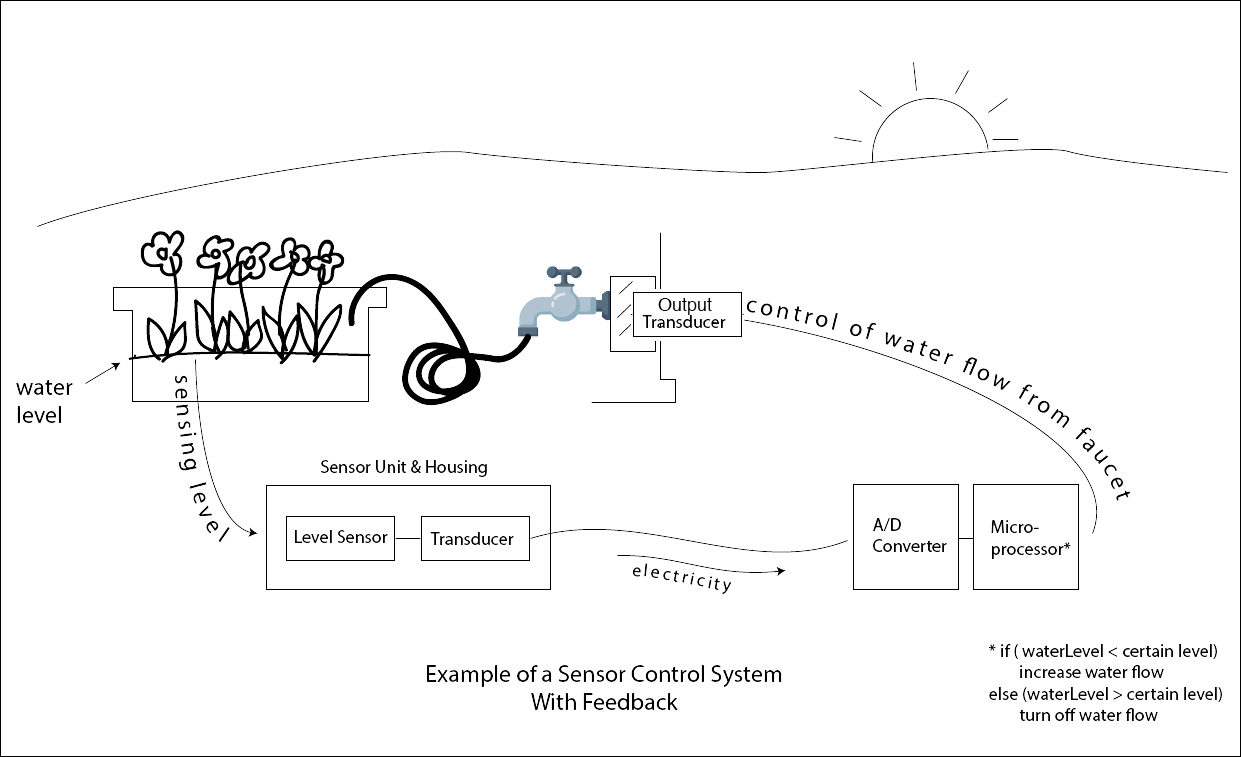
Answer, in terms of an algorithm (including sensing of light also):
loop while INPUT_LIGHT < MAX_LIGHT
if INPUT_WATER < MIN_WATER turn on water
loop while INPUT < MAX_WATER
// system continues being on
turn off water
end loop
turn off system
Compare this to the non-feedback control system of the last assessment statement.
Other Examples
It is most useful to think of specific control situations, in which real-time changes have to be continually monitored so that the resulting instructions can be maintained/changed/adapted based on the "live" situation "on the ground".
Example 1. Pressure Sensor of an NXT Robot (JSR point - at some stage change this to Java & FTC kit)
In the case of the pressure sensor attached to the NXT robot we looked at in class, it's transducer part is simply the little button which, when pressed in far enough, establishes a contact between two wires, and sends a current signal to the processor.
As part of the robot's control system, flowing current from this sensor is interpreted, when received, as a boolean 1. In the code run by the processor, while that signal from the sensor is 0 (i.e. current is not flowing), the robot moves forward at 100% speed, and when the signal turns to 1 (i.e. electricity is flowing) the robot goes backwards at 20% speed for one second - see below.
//RobotC code for NXT brick with a touch sensor attached toMovie of this Feedback to a Robot's Touch Sensor.
input 1, and two motors attached to inputs A and B. task main(){ while(SensorValue(touchSensor == 0){ motor[motorA] = 100; motor[motorB] = 100; } motor[motorA] = -20; motor[motorB] = -20; wait1MSec(1000); }
Example 2. Refrigerator
A refrigerator is able to keep a constant temperature to keep food safely cold through a feedback system of a temperature dial, thermometer sensor and associated microprocessor.
--> The initial temperature is set on the dial by the user
--> A thermometer sensor keeps track of the temperature of the fridge
--> Within a certain tolerance, when the sensor reports that the temperature has increased, this feedback results in the microprocessor turning the refrigeration unit turns on
--> And within a certain tolerance, when the sensor reports to the microprocessor that the temperature has decreased beyond the initial temperature as set, the refrigeration unit is turned off.
In this system the initial input of the user setting the temperature first affects the outputs (the microprocessor turns the refrigeration unit on). Then the outputs affect the inputs (refrigeration unit changes temperature reading of the sensor). We can thus say that the outputs affect the inputs; i.e., that this system involves feedback. The feedback keeps the system in a stable (in this case, constant, cold) state.
Example 3. The cruise control of a car
----------> EXCELLENT overall lesson on feedback and closed-loop systems <-----------
-
using a car's cruise control as the main example
- a must-watch, even though it's 9 minutes
This is the system that allows the driver of a car to set a certain speed he/she wants to drive at, and no longer have to keep their foot on the accelerator pedal.
--> The initial speed is set by the driver when they reach the desired speed
--> A sensor keeps track of the speed of the car
--> Within a certain tolerance, when the speed decreases - for example because of climbing a hill - the accelerator is automatically physically depressed further, until the initial speed is once again resumed
--> And within a certain tolerance, when the speed increases beyond the desired speed - for example because of descending a hill - the accelerator is released bit by bit or the breaks are automatically applied until the initial speed is once again resumed
Example 4. ABS (Anti-lock Braking System) braking system of a car.
This control system will apply the breaks only until skidding takes place. Upon skidding (i.e. the brakes have locked because of the lack of friction between the tires and the slippery road) it releases the breaks. But as soon as the skidding stops, it applies the breaks again.
If you have never experienced it, in a car applying ABS breaks hard in a sharp stop, it feels like a pulsing of the breaks during a quick, intense deceleration. This on and off, on and off, repetition requires continual feedback to work properly, achieving a controlled stop in the shortest amount of time possible. And lest we forget to mention, saving thousands of lives every year.
The feedback is as follows:
--> The initial input of the brake (i.e. indication that the driver wants to stop or slow down) is simply the brake pedal being depressed by the driver
--> Sensed information about whether the brakes are locking or not is continually sent to the microprocessor. This is based on sensing a combination of non-turning wheels, and continued motion forward of the car
-->
Upon receipt of locking event information, the microprocessor sends a signal to the brakes to be released completely or gradually gradually.
--> And upon receipt information that the locking has stopped, the brakes will be automatically applied again, either fully or gradually more and more
--> This constant monitoring and applying/releasing of brakes goes on until the vehicle has come to a complete stop, or the driver has released the brake pedal.
Note that feedback can occur in information-based systems as well. Often an output will have a result on further inputs. For example, the output of accepting an on-line booking for an air ticket will be to reduce the number of tickets available.
How to Handle Other Examples
For each situation, ask yourself two things:
1.
What is being sensed continually, i.e. what information is being sent to the microprocessor?
2.
What affect do certain changes in what is being sensed have in the control of the device/situation?
Describe the role of feedback in the following control system:
Automatic Doors: The role of feedback in an automatic doors control system is as long as the sensor does not sense an object within its range, the doors stay closed, and as soon as the feedback is received that there is something in the range, the doors open. There is also feedback from the inner part of the doors, that if there is pressure before they are fully closed (i.e. a person is stuck) that pressure feedback triggers the doors to re-open.
Heating Systems: The role of feedback in a heating system controlled by a digital sensor is that the sensor senses the temperature in the room, and when the temperature drops below a certain level, the heating system turns on, but when the temperature rises above a certain target level, then the heating turns off. The difference between the "turn on" and "turn off" temperatures must not be too close, otherwise the system would be constantly turning on and off.
Taxi Meters: In a taxi meter system which is managed by an odometer/timing system, the distance traveled is sensed/calculated in the normal way (by sensing the rotation of the wheels), and then that information is used to calculate the driving part of the fare (the fare may rise in certain situations, such as after midnight). Additionally, waiting time is measured and recorded and used to calculate additional charges for situations where the taxi driver has to wait for the passenger and/or they are stuck in traffic.
Elevators: Among the feedback systems of elevators, is constant monitoring of the amount of weight in the carriage; if it is over a certain per-determined safe weight, it will signal to the passengers in some way that the weight must be reduced before the elevator will move. Also, there is constant feedback from the proximity sensors in the door, which, when an object is sensed in-between them, the doors will open.
And so on... for the following, I'll just put in point form key sensors and control
Washing Machine... - weight controlling time of wash, - buttons pressed determining the kind of wash...
Domestic Robots... - pressure when hitting a wall etc., - the shape of the room for more complex "floor coverage" algorithms,...
GPS systems... Satellites: - exact location of each satellite itself, resulting in varying on-ground calculations. Ground GPS devices: - the signals from the three satellites being used, which allow the determination of position
Traffic Lights... - on-coming cars, via motion sensors, or weight sensors, control what color the lights should be
and other common devices...
Best content in compSci | Diigo - Groups
- LEGO.com MINDSTORMS : Community : NXTLOG
- Robot Square - (Mindstorms) Robot design and development
- Free SUMO Tutorial Mentor Teacher help notes Lego NXT Mindstorms robot