7.1.3
Evaluate different input devices for the collection of data in specified situations.
Teaching Note:
Scenarios will be based on familiar situations to students.
JSR Note: do investigate and try to understand better PID control loop.
JSR Note: here is where the FIRST FTC robot comes into play once again, with all the various Modern Robotics sensors.
Sample Question:
sdfsdfsf
From Sample Paper 1 - 2014:
JSR Notes:
First of all, as you go through this assessment statement, do keep in mind the overall context of looking at sensors - that sensors and microprocessors benefit us enormously by efficiently and precisely providing feedback to closed-loop control systems which are able to thus continually modulate and fine tune the control of a myriad of systems.
7.1.2 was looking at microprocessor/sensor control systems in general, versus the conventional or open-loop alternative. This assessment statement gets you to consider various (modern, closed loop) microprocessor/sensor control systems for particular situations. Therefore the main thing will be to evaluate what is the best kind of sensor control system for a given situation/context.
And that makes the ultimate place to look at in these notes to be the bottom part, in which evaluation is actually done. But first, here is a good - though certainly not exhaustive - list of various kinds of sensors.
Various Input Devices/Sensors
| Input Device/Sensor Name |
General Description |
Example |
Image |
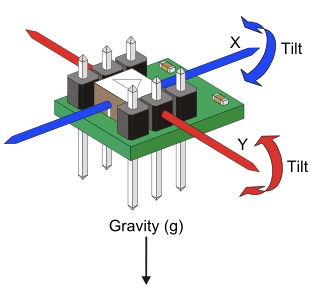
| Accelerometer |
|
Rocket launched into space |
 |
| Color Sensors |
Record the reflected color by lighting the white light at an object. Also record the intensity of the reflection (brightness). Through red, green and blue colour filters the photodiode converts the amount of light to current. |
Barcode reader.
QR codes |
 |
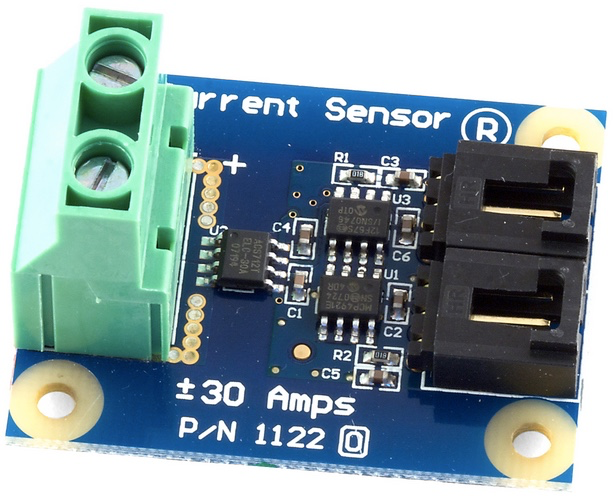
| Current Sensors |
A current sensor is a device that detects electric current in a wire, and generates a signal proportional to that current. The generated signal could be analog voltage or current or even a digital output. |
Motherboards of computers - just check voltage drop across a resistor, to calculate the current. |
 |
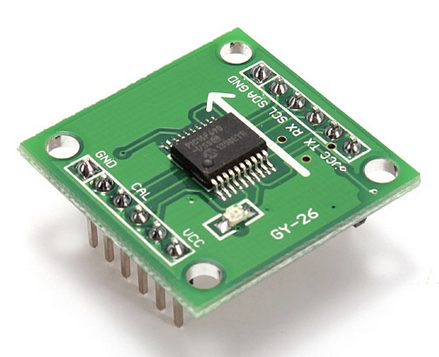
| Digital Compass |
|
Airplane (but need analogue backup) |
 |
| Infrared Encoder/Decoder |
(Explanations for the first 10 or so can be found at http://www.societyofrobots.com/sensors.shtml.) |
|
 |
| Air-Fuel Ratio Meter |
In internal combustion engines to determine how much oxygen is being output by the engine. |
It can be used to optimize the fuel efficiency of an engine.
And can be used to indicate a malfunction of the engine. |
 |
| Load & Torque Sensors |
Formula 1 |
Formula 1 pit stop tire change uses digital torque meters to screw on bolts exactly the right amount. |
 |
| Mercury Tilt Switch |
(more old school, and not necessarily with micro-controller and digital sensor - usually analogue. |
|
 |
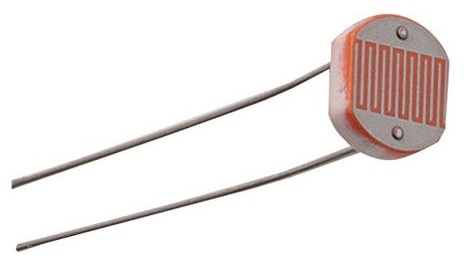
| Photo-resistor |
A photoresistor is a light-controlled variable resistor. The resistance of a photoresistor decreases with increasing incident light intensity; in other words, it exhibits photoconductivity. |
|
 |
| IR Range-finding |
Bounces IR off objects to determine how far away they are. |
Golf range finder
Scope for guns |
 |
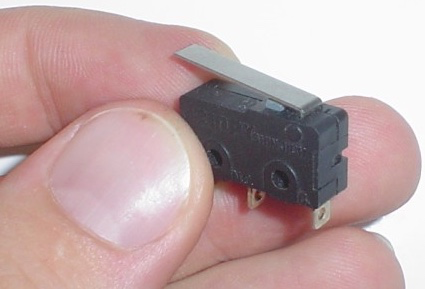
| Tactile Bumper Switch |
It is a switch that is used in robotic and other automated machines. It activates when the button on the surface is pressed. |
Crane
Ship loader
Golfcart Horns
Automatic doors at ISB |
 |
| Voice Recognition |
Can only be done by digital sampling and processing. No such thing as an "open sesame" analogue device. |
|

|
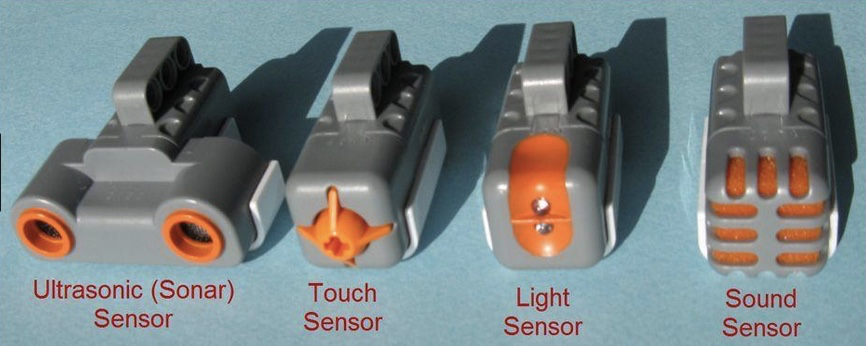
| Various NXT/Tetrix Sensors: |
Touch, Light, Color, Infrared, Sonar, Sound... |
LEGO Mindstorms robots
VEX robots |
 |
| Pressure |
For weather prediction - assume new digital systems are more - remember that analogue measurements will still be more accurate. |
|
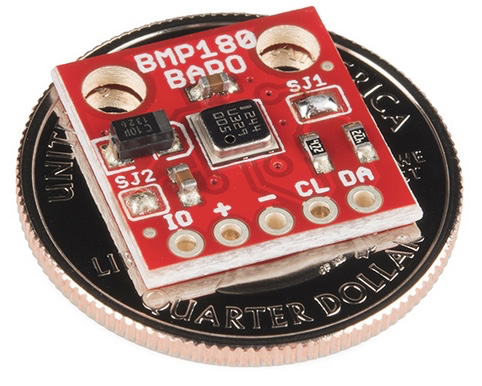 |
| Altitude |
Planes measure, and skydivers - using pressure, zeroing at the ground where will be the jump destination.
An altimeter or an altitude meter is an instrument used to measure the altitude of an object above a fixed level. |
For sky diving may choose analogue option, since less prone to breakage, and precise enough. (Is "zeroed" at planned point of landing before the jump.) |
 |
| Smells and all Chemicals |
|
|
 |
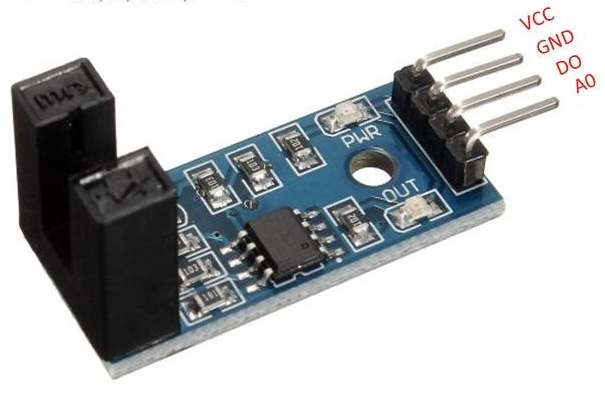
| Speed via GPS and/or accelerometer |
Calculates displacement over a certain period of time to acquire speed. |
Phone (Uber/Grabtaxi)
Fitbit |
 |
| Weight |
|
|
 |
| Force |
|
Newest iPhone has pressure sensitive touch screen |
 |
| Motion detector |
It is a sensor which detects the physical movement on a device or within environment. |
|
 |
| and... |
|
|
|
Devices with Multiple Sensors
Smart Phones
| "Familiar" Situation |
Input (i.e. Sensor) Device
Options |
Advantages |
Disadvantages |
1. Inputting information to my computer |
1. Track-pad
|
Can do many gestures, such as three finger drag etc.
Is a great alternative to mouse to add variety to input methods, and so prevent repetitive stress injuries (RSIs). |
Harder for older people to figure out. |
| |
2. Mouse |
Precise (depending on precision of particular mouse)
Possibly ergonomic, fitting the shape of the user's hand. |
If not wireless, the chord.
If wireless possible poor connection or temporary loss of connection to computer.
If not perfect ergonomic fit to user's hand, real RSI (Repetetive Stress Injury) potential. |
| |
Future:
3. Leap Motion Controller
|
Leap: more body movement, and so more exercise to a degree.
Good for big screens on the wall, for example.
Great for presentations. |
Leap: not very accurate at this point.
|
| |
Future:
4. Mind reading |
Mind reading: prevent RSIs, less annoying office noise. |
If the computer can read our mind, who else can... |
| 2. Traffic light control (example of Nebusice traffic light by the Nebusice School) |
1. Motion sensor / camera
(Traditional digital)
|
Cheaper
Easier to install and maintain
More accurate potentially.
Important here is to appreciate the goal, which is to slow down on-coming traffic before the school, so all it has to do is sense cars going over a certain speed and turns red so that they slow down, and then it turns green. |
Can (possibly) be tricked by blowing leaves or other interference. |
| |
2. Weight pressure sensor
(Traditional digital) |
More reliable, since can only be one thing when a heavy vehicle is over the sensor; not tricked by other things.
Arguably more aesthetic since hidden, and driver is possibly not made nervous by a camera looking at them.
|
Harder to maintain since would have to dig up the asphalt.
Much more expensive to install, since not only the sensor, but the digging up and re-paving of the street. |
| |
Future: 3. Google drive |
Much more intelligent algorithms based on overall traffic flow of a city, not just the individual traffic light.
Once perfected, will make driving so much more safe.
link to Google video |
At this point, prone to errors.
Probably expensive and difficult to set up.
|
| 3. Automatic Sliding Doors at a School |
Motion sensor |
Cheap.
Easy to install.
Easier to fix/replace |
Can be tricked by interference by wind, leaves, and so on. |
| |
Weight sensor |
More reliable and accurate than a motion sensor. |
More expensive and physically invasive to install (need to damage and replace tiles).
Hard to fix/replace
Would it be activated by little kids?
|
| |
Video camera and security guard |
Ability to control who enters and when. |
Overkill for a school; expensive to have a full-time guard monitoring and working the entry system.
Even late at night, when only rarely people need entry, a security guard would have to be responsible for operating it.
|
| 4. Video Game input |
Wii
|
Fairly reliable compared to other present commercial options.
USB reliability |
The user is tethered to machine. |
| |
Kinect |
No wand needed, only body movements.
Possibilities of more kinds of body movements without more wand devices needed.
|
Not so accurate. |
| |
Play-station Move Motion |
Same as Wii?
|
Same as Wii? |
| |
USB joystick |
Tried and true, mature technology.
|
Can't stand with it; need a table. |
5. Domestic work
(particularly cleaning the floor) |
Roomba
|
Simple to maintain.
Specialized to do that specific task.
Easy to operate.
|
Inaccurate.
A single task domestic robot. |
| |
Asimo - voice control |
Can do a lot more than just clean the floor.
Don't have to move from the sofa.
|
Can misunderstand you ("No, no, I said take ***out*** the garbage...), and may have trouble with different accents. |
| |
Future - Asimo 10 - mind control
(And think of the stuff being done at Boston Dynamics with humanoid robots.)
|
Don't even have to open your mouth! |
(Will be) much more prone to mis-interpretations. |
| |
|
|
|
6A. Security Access to School - Czech Republic
|
Thumb-scans. |
Very hard to trick.
Unquestionably cool. |
Expensive technology.
Maintenance of the system would be difficult and expensive. |
| |
Smart Phone |
Everyone always has their phone with them.
It would have a "cool" factor that school's administration and Development Office would see as benefiting the image of the school.
|
Actually, everyone does not ***always*** have their phone with them. |
| |
ID cards with magnetic strip |
Easy to implement. Simple, mature technology.
Could be combined with existing cafeteria payment cards. |
Cards get lost.
Cards could be easily stolen. |
| |
|
|
|
| 6B. Security Access to Google-plex - California |
Thumb-scans. |
Very hard to trick, and security in this case more of a priority.
The unquestionably cool aspect fits in nicely with the image of the company.
Google can afford it. |
None really. |
| |
Smart Phone |
Everyone always has their phone with them. |
Actually, everyone does not ***always*** have their phone with them. |
| |
ID cards with magnetic strip |
Simple, but no need to combine with cafeteria payment cards; food for worker of the Google-plex is free. |
Easy to counterfeit and steal.
So poor security compared to other options. |
Digital or Analogue??
One final note is how it's interesting that yes, modern digital systems can often offer you more flexibility and options, but sometimes you are more concerned with reliability, and/or precision, and analogue systems may still be better.
In terms of reliability, some analogue systems work based on unalterable physical principles, and are made of hardy pieces, so are less prone to malfunction or breakage. And in terms of precision, recall that digital systems ultimately measure discrete values, whereas analogue readings and variations are theoretically infinite.


